TEAM BALLOONS!
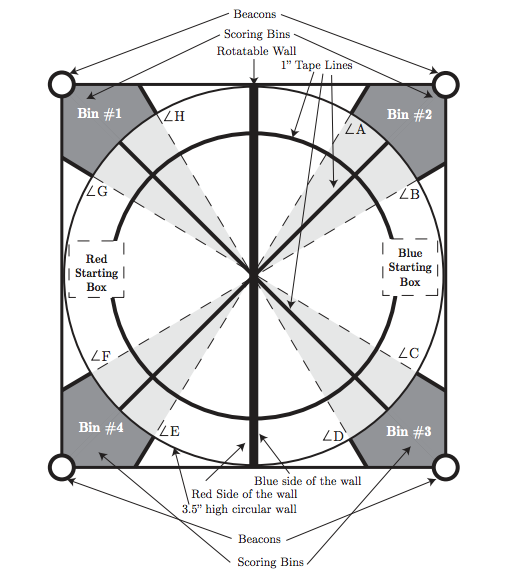
This project was done for Stanford's mechatronic class-- ME218B. The goal of the project was to create a robot that played a unique game involving ping pong balls, four bins and a rotating wall (set up is shown on the left). During game play competing robots are placed on either side of the rotating wall-- one designated as the red side, the other the blue side. With the game start, each bot has to determine which side it is on and announce its color in some way. Then the bot has to pick up ping pong balls -- strewn on the field before the start of the game-- and score them in one of four bins. Each bot has possession of the bins on its side of the wall, but if the wall is pushed to rotate, each bots can exchange possession of the bins as different bins end up on the red or blue side. At the end of the game, each bot's score is determined by the number of balls in the bins on its side. Each bot wirelessly receives information about the number of balls in each bin and the angle of the wall throughout the game, yielding an element of strategy to the game!
Our bot had a few unique features that set it apart from the others-- most notably, that it popped balloons to indicate which team color it was. Another unique feature was its method of picking up balls. The ball collector was two conveyor belts-- one horizontal conveyor that drew balls towards the back of the bot and another vertical conveyor that pulled balls up into a ball containment area at the top of the bot. Once the bot collected enough balls it would make its way to the appropriate bin and use a servo-controlled gate to deposit the balls. The bot had two IR distance sensors, mounted near the front, that allowed it to avoid walls as well as track the wall while driving to its desired destination. Two tape detectors on the front of the bot allowed the it to also respond to the various tape lines in the arena.
Our bot had a few unique features that set it apart from the others-- most notably, that it popped balloons to indicate which team color it was. Another unique feature was its method of picking up balls. The ball collector was two conveyor belts-- one horizontal conveyor that drew balls towards the back of the bot and another vertical conveyor that pulled balls up into a ball containment area at the top of the bot. Once the bot collected enough balls it would make its way to the appropriate bin and use a servo-controlled gate to deposit the balls. The bot had two IR distance sensors, mounted near the front, that allowed it to avoid walls as well as track the wall while driving to its desired destination. Two tape detectors on the front of the bot allowed the it to also respond to the various tape lines in the arena.
